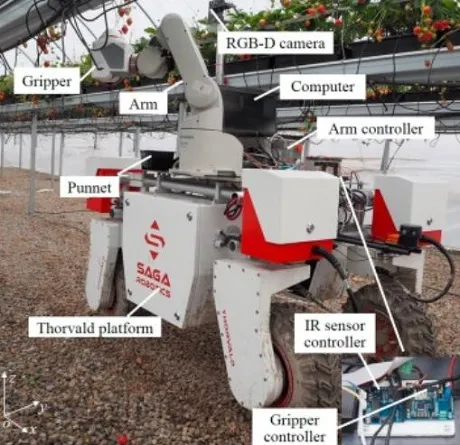
Ricercatori dell'Università norvegese di Scienze della vita, insieme al Dipartimento di Scienze informatiche dell'Università del Minnesota, hanno sviluppato e valutato un robot per la raccolta di fragole coltivate fuorisuolo in polytunnel. Il robot è costituito da una pinza di nuova concezione montata su un braccio industriale che, a sua volta, è montato su una base mobile insieme a una telecamera RGB-D. La nuova pinza guidata da cavi può aprire le dita per "inghiottire" il frutto. Dal momento che è progettato per individuare il frutto e non il gambo, richiede solo la posizione della frutta per la raccolta. Il robot dispone di un contenitore interno che viene utilizzato per raccogliere le bacche durante la raccolta.
Il tempo di raccolta è significativamente ridotto. Il sistema di visione funziona per selezionare fragole mature e raggiungibili, con una rapida elaborazione. Questi componenti sono integrati in un sistema completo le cui prestazioni vengono analizzate a partire dai quattro principali casi di errore del sistema di visione: rilevazioni mancate, duplicate, localizzazione imprecisa e errore di segmentazione. L'integrazione consente al robot di raccogliere a ciclo continuo, spostando la piattaforma con un joystick.
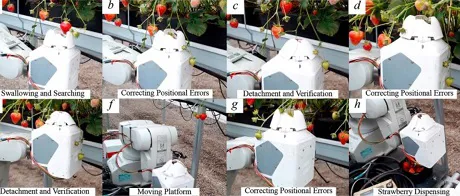
Il sistema è stato valutato in campo e ne sono stati analizzati gli insuccessi. Il tempo del ciclo di prelievo è di 7,5 s con una percentuale di successo del 53,6% in ambiente agricolo. La maggior parte dei fallimenti si riscontrano quando si selezionano le fragole nei grappoli, in cui sia l'algoritmo di rilevamento che la pinza lottano per separare le bacche.
Fonte: Ya Xiong, Cheng Peng, Lars Grimstad, Pål Johan From, Volkan Isler, 'Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper', 2019, Computers and Electronics in Agriculture, Vol. 157, pages 392-402.