La gestione dei moderni impianti peschicoli si confronta oggi con una crescente complessità produttiva, determinata dalla riduzione della manodopera qualificata, dalla variabilità climatica e da requisiti sempre più stringenti in termini di qualità, sostenibilità e tracciabilità. In questo contesto si inserisce il progetto S4O – Smart Specialized Sustainable Stonefruit Orchard, che propone un modello di pescheto automatizzato basato sull'integrazione di robotica agricola, sensoristica avanzata, sistemi di supporto alle decisioni (DSS) e soluzioni agrivoltaiche.
Nel pescheto sperimentale S4O, l'automazione non sostituisce la decisione agronomica, ma la supporta rendendo gli interventi più oggettivi, tempestivi e ripetibili. Sistemi di monitoraggio continuo, integrazione dei dati in piattaforme cloud e utilizzo di sistemi di supporto alle decisioni (DSS) permettono di trasformare scelte tradizionalmente basate sull'esperienza in azioni tracciabili lungo l'intero ciclo colturale.
 Figura 1. Rover autonomo di Field Robotics in azione nel pescheto sperimentale del progetto S4O
Figura 1. Rover autonomo di Field Robotics in azione nel pescheto sperimentale del progetto S4O
Gestione irrigua automatizzata: risparmio idrico e controllo microclimatico
Un primo ambito chiave è rappresentato dall'irrigazione automatizzata tramite il DSS IRRIFRAME. Nel progetto, il Consorzio di Bonifica per il Canale Emiliano Romagnolo (CER) ha adattato IRRIFRAME alle condizioni microclimatiche generate dalle coperture fotovoltaiche, confrontandole con il pieno campo e con la copertura antigrandine. A supporto sono state installate tre stazioni meteorologiche dedicate e un sistema di monitoraggio giornaliero dell'intensità luminosa sotto copertura fotovoltaica.
L'automazione completa dell'irrigazione è stata ottenuta collegando una centralina irrigua IoT alle API di IRRIFRAME: il DSS elabora quotidianamente il bilancio idrico sulla base dei dati microclimatici e invia direttamente la programmazione alla centralina, che esegue i turni irrigui solo quando necessario. In questo modo il consiglio irriguo si traduce automaticamente in intervento operativo. Nell'ambito delle prove sotto copertura fotovoltaica sono stati testati tre livelli irrigui (100%, 70% e 50% della richiesta evapotraspirativa stimata), con risultati preliminari positivi in termini di risparmio idrico; sono attualmente in corso le analisi sugli effetti produttivi e qualitativi.
Automazione degli interventi di difesa e protezione del frutteto
Un secondo asse di automazione riguarda la difesa fitosanitaria e la protezione dalle gelate tardive. Nel frutteto S4O è stato installato un sistema di irrorazione antibrina opportunamente modificato, sulla base delle esperienze del progetto S3O, per operare come sistema di irrorazione a punto fisso. L'obiettivo progettuale è rendere quanto più automatizzabili e remotizzabili possibile anche le operazioni di trattamento fitosanitario. A causa di ritardi nella fornitura e installazione dei materiali, nella stagione 2025 è stato possibile effettuare esclusivamente il collaudo in campo del sistema; la fase di utilizzo operativo per la difesa dalle patologie sarà avviata nella prossima stagione, anche in combinazione con la copertura fotovoltaica, che dovrebbe contribuire a ridurre la bagnatura fogliare e quindi il rischio di sviluppo di malattie. In questo contesto, l'automazione in S4O non riguarda solo il supporto alle decisioni irrigue, ma si estende all'attuazione diretta degli interventi in campo, integrando dati, sistemi di controllo ed energia per rendere più tempestive ed efficienti anche le strategie di difesa e protezione del frutteto.
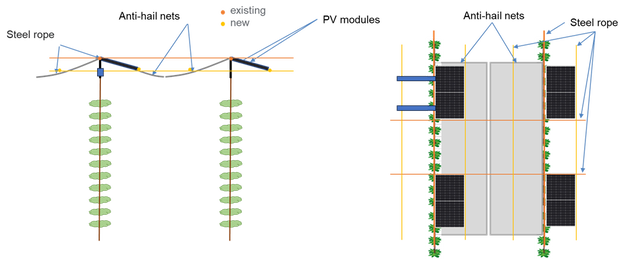
Figura 2 Soluzione di integrazione di moduli fotovoltaici sospesi
Rover elettrico a guida autonoma per il monitoraggio avanzato del pescheto
In questo contesto si inserisce anche il rover elettrico a guida autonoma sviluppato da FieldRobotics, impiegato nel progetto S4O come piattaforma mobile per il monitoraggio avanzato e, in prospettiva, per alcune operazioni colturali. Il mezzo, completamente elettrico, è progettato per muoversi tra i filari e consente di elettrificare e automatizzare attività ripetitive, riducendo emissioni locali, rumore e compattazione del suolo. Attorno al rover sono stati integrati sistemi di rilevamento dei frutti in grado di stimarne dimensione e colore lungo le file, fornendo informazioni oggettive su carico produttivo, andamento del calibro e uniformità di maturazione. L'utilizzo del rover ha inoltre permesso di migliorare la robustezza e la precisione della guida autonoma in filare e di avviare lo sviluppo di una modalità di navigazione in campo aperto basata su diversi punti di riferimento detti waypoint, ampliando le potenzialità di impiego come piattaforma logistica elettrica per il pescheto.
Agrivoltaico multifunzionale a supporto della gestione automatizzata del pescheto
Un ruolo strategico nel progetto è infine svolto dall'agrivoltaico. L'integrazione di strutture fotovoltaiche nel pescheto è concepita non solo come fonte di energia rinnovabile, ma anche come strumento per modulare la radiazione incidente sulla chioma, contribuendo alla stabilizzazione del microclima e alla mitigazione degli stress termici e idrici. L'energia prodotta può alimentare rover autonomi, sistemi irrigui intelligenti e infrastrutture IoT, creando un collegamento diretto tra automazione, elettrificazione e riduzione della dipendenza da fonti fossili. In questa prospettiva si inserisce la collaborazione avviata da FieldRobotics con AVONI Industrial, da cui sono emersi i primi modelli di ricovero smart per rover a guida autonoma, dotati di stazioni di ricarica, sistemi di calcolo e connettività, oggi alimentabili da pannelli fotovoltaici dedicati e in futuro integrabili con sistemi agrivoltaici progettati ad hoc.
L'assetto sperimentale adottato in S4O utilizza coperture multifunzionali per simulare le condizioni di ombreggiamento tipiche di un impianto agrivoltaico, affiancando tale approccio alla definizione dell'architettura fotovoltaica in sviluppo per l'integrazione strutturale ed energetica nel frutteto.
Nella Figura 2 è riportato lo schema di integrazione tra moduli fotovoltaici e struttura di un frutteto, che sfrutta prevalentemente l'ossatura di sostegno esistente, integrandola con tenditori in acciaio e semplici elementi di supporto per il sostegno dei moduli. La soluzione proposta è estremamente leggera ed elastica, in grado di adattarsi alla naturale variazione della geometria dell'impalcato nel tempo e di resistere al carico degli agenti atmosferici. Questo approccio consente di gestire diversi posizionamenti rispetto al filare e diversi orientamenti dei pannelli fotovoltaici per adattare l'installazione al sito e alla produzione agricola sottostante.
 Figura 3: In foto il pescheto sperimentale del progetto S4O visto dal drone
Figura 3: In foto il pescheto sperimentale del progetto S4O visto dal drone
Nel complesso, la combinazione di robotica elettrica, sensoristica distribuita, DSS e infrastrutture agrivoltaiche rende il pescheto S4O un laboratorio reale di frutticoltura del futuro, in cui monitoraggio, interventi colturali ed energia sono gestiti in modo coordinato e dinamico. L'automazione emerge così non solo come leva di efficienza, ma come elemento abilitante per la sostenibilità ambientale ed economica della peschicoltura in un contesto di cambiamento climatico e crescente attenzione della filiera ai temi green.
Iniziativa realizzata nell'ambito del Programma regionale - Fondo europeo di sviluppo regionale 2021-2027 - Priorità 1, Obiettivo specifico 1.1, Azione 1.1.2 Tipo di operazione: Bando per progetti di ricerca industriale strategica - Progetto "Smart Specialized Sustainable Stonefruit Orchard – S4O".









